
功能还在开发中,先来一张图:
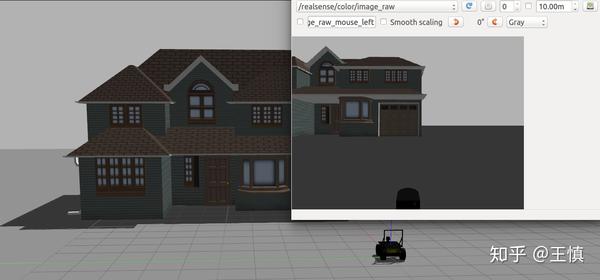
上图是基于Husky模型,添加了激光雷达和Intel的RealSense模型。
完成了模型搭建,接下来开始进行手动控制博彩游戏,我们先启动仿真环境和RVIZ。
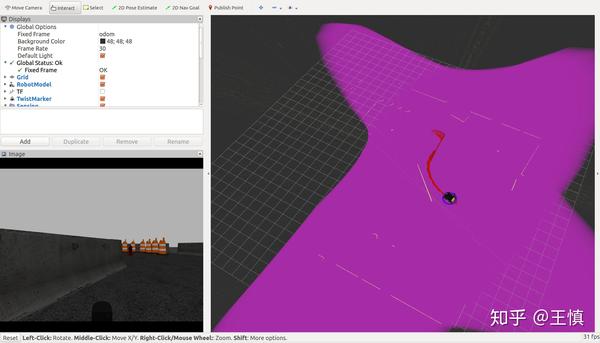
在 RVIZ 菜单栏中选择 interact 选项,在Husky周围出现交互式标记,可用于控制Husky。
通过调用rqt工具,选择Plugins->Robot Tools->Robot Steering,出现Robot Steering控制界面。
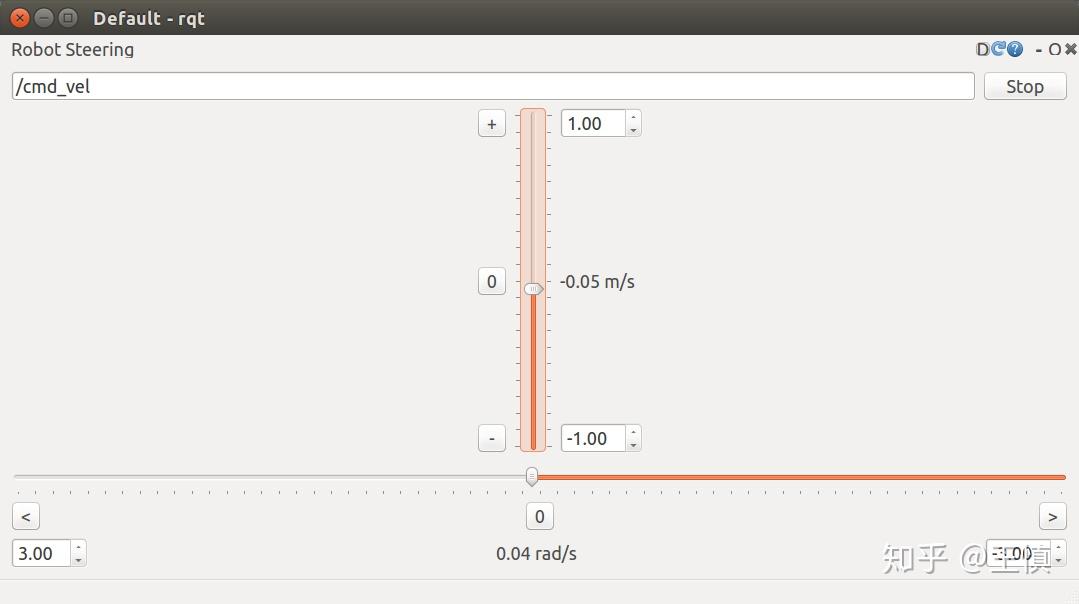
移动上下滑条,控制Husky前后向行进,也就是向 src="https://pica.zhimg.com/v2-4d0e10ec8f23cf2f4a3fd1afbdfbed1d_s.jpg?source=12a79843">
王慎的视频 · 8 播放上面几个步骤完成了无人车的控制和实时图像输出 接下来,我们就进行一些算法开发,欢迎大家持续关注。



